
















 91 / 100
91 / 100

CONTROLLO
tecnica
91
Automazione e Strumentazione
Aprile 2017
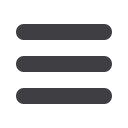
As it can be seen, one of the characteristics of the uSort
tuning is that robustness only affects the proportional
gain.
υ
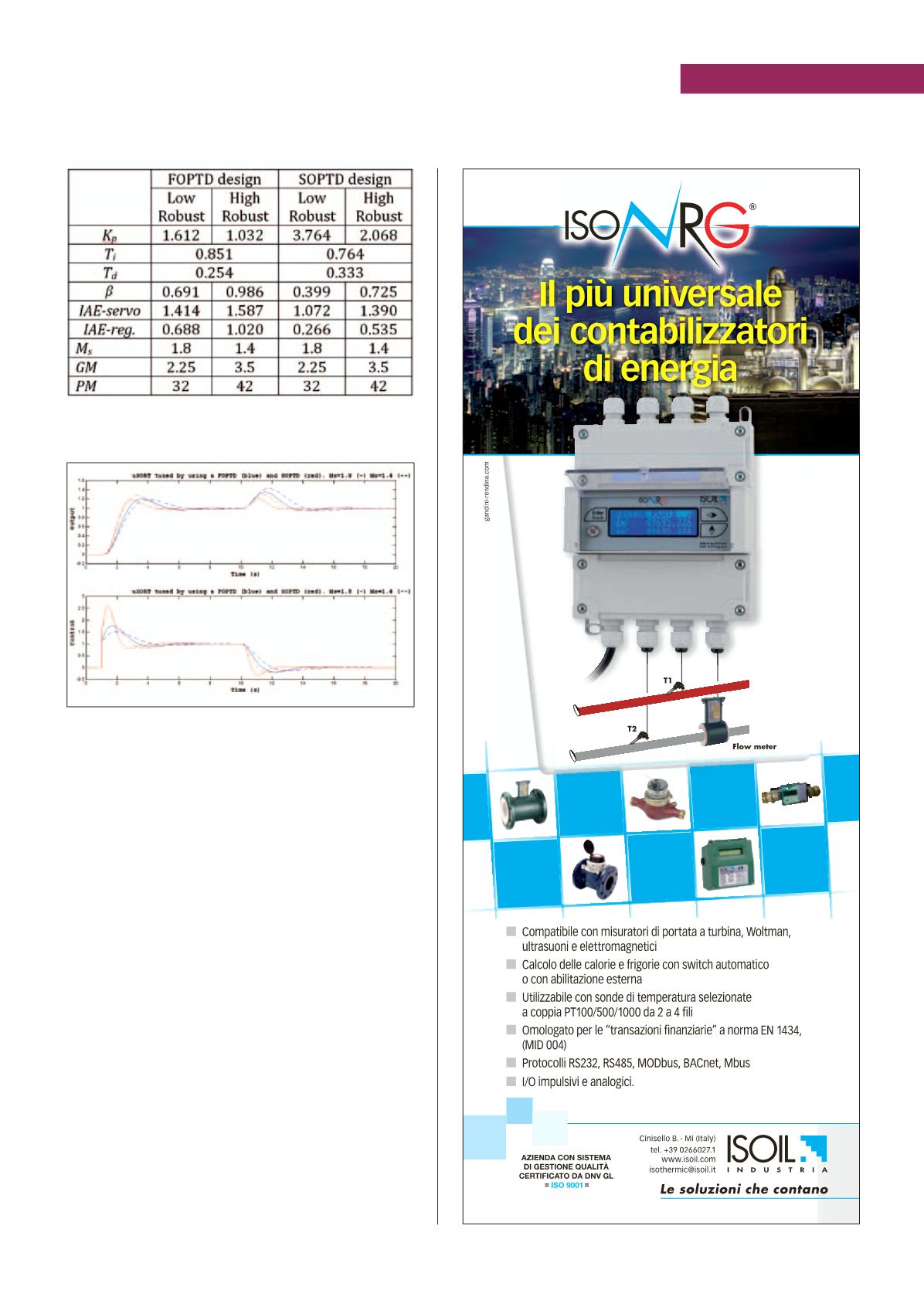
Figure 2
shows the output and control signals
for the considered design case studies. The advantage of
using a more elaborated model can be observed as a more
high performance control system can be attained even
with a more severe robustness constraint.
References
[1]
O’Dwyer.
Handbook of PI and PID Controller Tun-
ing Rules
. Imperial College Press, London, UK, 3rd. edi-
tion, 2009.
[2]
V.M. Alfaro, R. Vilanova. “Simple Robust Tuning of
2DoF PID controllers from a performance/Robustness
trade-off analysis”.
Asian Journal of Control
, Vol. 15, No.
5, pp. 1–14, September 2013.
[3]
F. G. Shinskey. “Process Control: As Taught vs as Prac-
ticed”.
Ind. Eng. Chem. Res.
, 41:3745{3750, 2002.
[4]
R. Vilanova, A. Visioli.
PID Control in the Third Mil-
lenium - Lessons Learned and New Approaches
. Spring-
er-Verlag London Limited, 2012.
Table 2 - uSort controller parameters and performance measures
for the design case study example
Figure 2 - Output and control signals for the uSort design example