
















 90 / 100
90 / 100

CONTROLLO
tecnica
90
Aprile 2017
Automazione e Strumentazione
where the weights, and , of the reference signal are introduced
in order to have the possibility to do an independent processing
of the reference and output signals. In such case we are facing a
two degree of freedom (2-DoF) PID controller. Whereas the set-
point weight usually takes values between 0 and 1, the value is
usually set to 0 in order to avoid derivatives of the reference signal
that can generate the well known derivative
kick
.
uSort: an unified PID tuning
As PID controller tuning has been in place during almost 80 years,
there are out there numerous proposals on how to select the con-
troller gains.. The book
[1]
provides a quite panoramic and cata-
logued view on existing methods. Tuning rules and suggestions
for controller gains are usually provided depending on the con-
troller structure (PI, PID, 1-DoF, 2DoF ecc.), controlled process
model (first order, second order, integrative, unstable, etc) and, of
course, specifications for the closed-loop behaviour. The elevate
number of variations and possibilities constitutes a nightmare for
the PID operator that has to change the setup depending on the
concrete scenario.
Whereas it may be understandable that a change in the closed-loop
specifications should impose a change in the way the controller
gains are parameterised, it may in turn be desirable that the fact of
having a PI or a PID should not change the controller gains. This
is one of the aspects this note is referring to when stating about an
unified PID tuning approach.
Tuning is usually a compromise between performance and robust-
ness. In fact, information about the process to be controlled takes
the form of a model but this is always incomplete. Therefore,
robustness is needed in order to preserve the basic properties that
the model-based tuning provides. Among them, stability of the
controlled system is a first need. Also, to minimize the degrada-
tion of the performance is desirable. As a basic tradeoff, as more
robustness is imposed, the model-based tuning tends to provide
lower performance. This is why some tunings focuses exclusively
on loop performance, whereas others are aimed to ensure robust
stability, or a compromised mix of both, etc. Among the consid-
ered loop performance measures, integrated indexes are among
the most popular, being the Integrated Absolute Error (IAE)
the one that has gained most acceptance as being correlated with
economic considerations
[3]
. Minimum-IAE tuning, although
maximizing performance, tends to leave a low margin of stability.
Moreover, as higher-performance controllers are used, the stabil-
ity margin decreases. It is therefore needed to achieve a reasonable
trade-off among both considerations.
In
[2]
the optimal IAE PI/PID tuning is addressed by also consid-
ering the optimal way of degrading the performance in such a way
certain degree of robustness is achieved. Very simple tuning rules
are provided for PI/PID controller based on controlled process
models of first as well as second order plus dead-time. For such
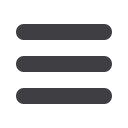
purpose, a process model of the following generic form is assumed
with 0 ≤
a
≤ 1. Notice that for the particular case a=0 the usual first
order plus time delay process model is recovered. Simple tuning
rules for the PI/PID controller parameters are provided for optimal
servo and regulation operation under the parameterizations dis-
played in
υ
Table 1
:
The values for the
a
i
,
b
i
,
c
i
and
d
i
are provided in
[2]
depending
on the process model constants as well as desired robustness for
the closed loop system. For the regulatory tuning, it may happen
that very poor set-point-following performance is observed. Then,
to improve the servo-control performance, the set-point weight is
also provided. It is important to highlight that this table provides
parameter values for PI and PID controllers in an unified way.
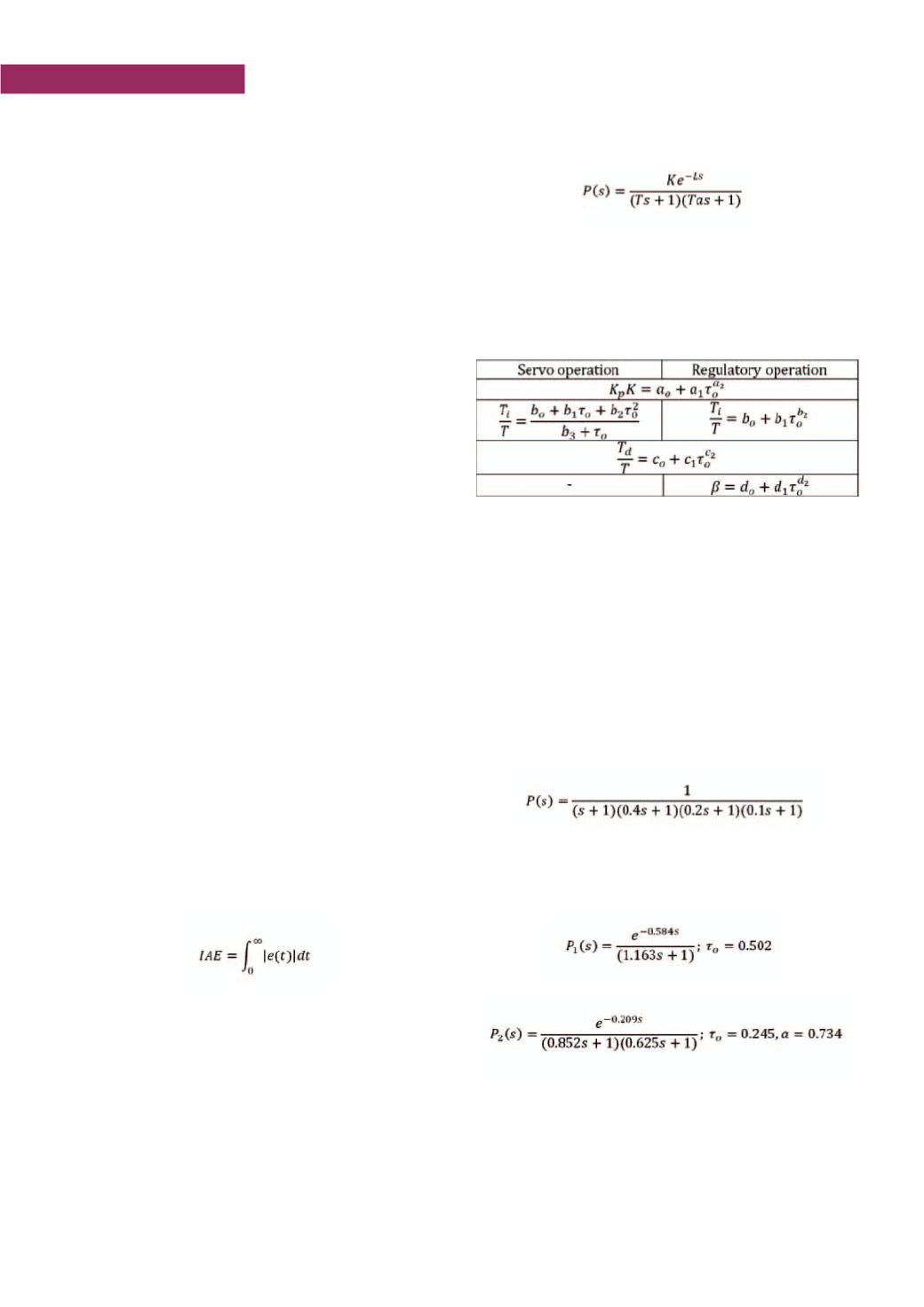
Example
To illustrate the use of the uSort tuning, we consider a process
whose dynamics is represented by the following transfer function:
As approximations of the dynamics described by
P(s)
, the follow-
ing first order plus time delay (FOPDT) and second order plus
time delay (SOPDT) models were obtained:
Whereas
P
1
(s)
is the usual process model used for PID design,
here we will also make use of
P
2
(s)
as a better model for
P(s)
. In
υ
Table 2
, the corresponding PID controller gains are provided
by using
P
1
(s)
and
P
2
(s)
as models for controller design. For each
case, two desired robustness are considered. All the designs are
optimized for a regulatory operation and including the set-point
weight for set-point tracking improvement.
Table 1 - uSort PI/PID Tuning relations