Versione HTML di base





S
SI
efficienza
AUTOMAZIONE OGGI 357
SOLUZIONI SOFTWARE PER L’INDUSTRIA 137
Questi moduli sono eseguiti nello stesso runtime in Twin-
CAT 3. Inoltre, l’uso di un framework universale permette la
loro interazione ottimale.
Per la loro creazione, in TwinCAT 3 sono utilizzate tecnolo-
gie universali orientate agli oggetti. Lo scopo è incapsulare
gli oggetti stessi in modo da creare moduli espandibili, ri-
utilizzabili e facili da mantenere. Per lo sviluppo efficiente
o per il collaudo e l’in-
stallazione dei moduli
software è necessario
incorporare opzioni
di simulazione. Ciò è
possibile in TwinCAT
3 grazie alla sua con-
cezione modulare:
oltre ai moduli sof-
tware della logica di
controllo è possibile
integrare altri moduli
per simulare le diverse
aree dell’impianto.
In parallelo al mo-
dulo di simulazione
hardware si può ge-
nerare anche un mo-
dulo di simulazione
del software di controllo. Lo scopo è testare l’hardware
dell’impianto senza avere ancora la piena disponibilità del
controllore (SIL – Software In the Loop). Per il debugging du-
rante lo sviluppo dei moduli devono essere disponibili fun-
zioni in tutti i linguaggi di descrizione supportati. Mentre il
monitoraggio dei valori online è una caratteristica standard
degli editor IEC 61131-3, finora ciò non è stato possibile con
gli editor per C++. TwinCAT 3 è il primo tool che lo permette
nell’ambiente di sviluppo. Un’altra funzione di debugging
standard è l’uso di breakpoint. Mentre ciò è possibile nei lin-
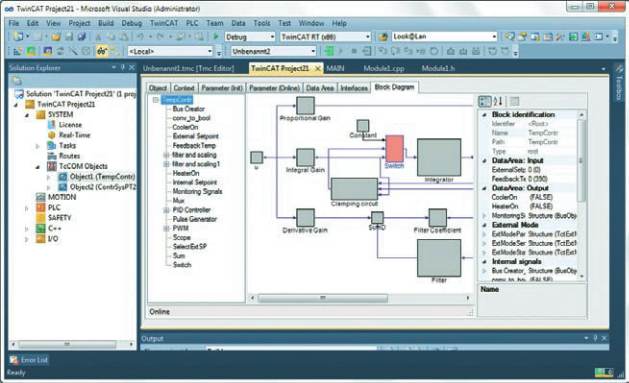
guaggi IEC 61131-3 o in C++, lo stesso non
vale per un ‘diagramma a blocchi’ generato
da Matlab/Simulink. La situazione è analoga
per quanto riguarda la localizzazione degli
errori. TwinCAT 3 permette l’illustrazione
grafica dell’errore. In altri termini, permette
l’uso universale di funzioni di debugging
che offrono opzioni identiche in tutte le
risorse di linguaggio disponibili, come mo-
nitoraggio online, breakpoint, stack di chia-
mate, finestra di disassembly, ecc.
Un’ulteriore possibilità per aumentare l’ef-
ficienza dell’ingegnerizzazione è l’uso di
funzioni che generano automaticamente la
configurazione dell’hardware di controllo o
parti del programma di controllo. TwinCAT
3 offre la piattaforma ideale allo scopo: da
un lato, con il supporto di formati standard,
ad esempio con l’uso del formato XML PLCopen come for-
mato di scambio dati per progetti PLC e con la configura-
zione completa del controllo tramite formati dati basati su
XML. Dall’altro lato, è disponibile una Beckhoff Automation
Interface (API) per accedere alla completa funzionalità di
TwinCAT 3.
Non va dimenticato che TwinCAT 3 permette di mappare
la struttura modulare della macchina direttamente nel sof-
tware, indipendentemente dal linguaggio di descrizione
selezionato. Infine va sottolineato come la disponibilità di
un’infrastruttura di sviluppo universale permette di ren-
dere più efficiente l’ingegnerizzazione di macchine e im-
pianti. Un obiettivo raggiunto incorporando TwinCAT 3 nel
framework Visual Studio 2010, con il supporto delle sue in-
terfacce native.
Beckhoff Automation
Visualizzazione di un errore nel diagramma a blocchi
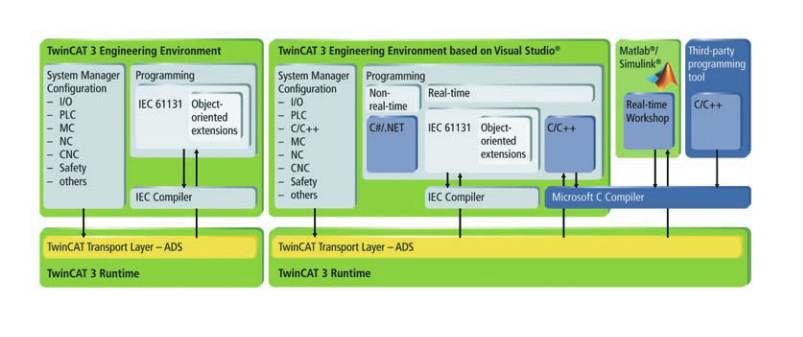
L’integrazione completa di TwinCAT 3 in Visual Studio permette all’utente di utilizzare i linguaggi di
programmazione IEC 61131 e C/C++ in parallelo