Basic HTML Version








108
AUTOMAZIONE OGGI 354
SOLUZIONI SOFTWARE PER L’INDUSTRIA
Nell’ambito della produzione eolica, il vento genera una forza
ascendente sulle pale rotoriche delle turbine sviluppando il
movimento necessario alla generazione dell’energia. Ma, a
partire dalla velocità del vento di circa 12 m/s, la potenza al
rotore diventa maggiore dell’uscita nominale della turbina e
deve essere quindi limitata. A tale scopo, viene modificato
l’angolo d’ingresso del vento regolando l’inclinazione delle
pale rotoriche. Questo metodo di regolazione viene chiamato
’pitch control’. Il relativo loop di controllo è fortemente non
lineare a causa del comportamento aerodinamico delle pale.
Quando si progetta la meccanica di una turbina eolica, i cari-
chi che gravano sulla turbina sono decisivi, per cui è richiesta
un’attenta parametrizzazione del controllore di velocità. La
preconfigurazione dei parametri del controllore avviene grazie
a un processo di simulazione in cui un modello computeriz-
zato della turbina viene sottoposto a diversi profili standar-
dizzati del vento. Il processo di ottimizzazione è complesso e
laborioso e la soluzione finale è solo il migliore compromesso.
Uso della logica fuzzy
I controllori fuzzy operano su stati non lineari, si fanno ap-
prezzare per la loro robustezza ed è noto che il loro uso in
sistemi altamente non lineari porta a ottime caratteristiche di
controllo. Questi dispositivi si basano su regole per le quali,
anche se il modello cambia, il processo fondamentale rimane
lo stesso e le regole restano valide. Il valore di controllo è cal-
colato sulla base di tali regole, quindi non occorrono informa-
zioni esatte sul sistema. Per questo, i controllori fuzzy meglio
si prestano a gestire diverse tipologie di turbine. Inoltre, la
parametrizzazione è semplificata, perché è su base cognitiva
e non sono richieste conoscenze matematiche. Sulla base
di queste considerazioni, Beckhoff ha progettato un control-
lore fuzzy per il software di automazione TwinCAT, al fine di
regolare l’inclinazione delle pale e quindi la velocità dei rotori
delle turbine eoliche in modo efficace. Il pitch controller fuzzy
per TwinCAT monitorizza la velocità del rotore e decide di
conseguenza la relativa inclinazione delle pale.
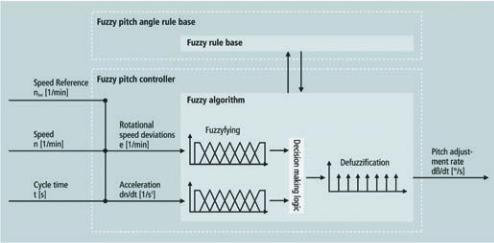
La deviazione della velocità dal valore importato e l’acce-
lerazione del rotore sono calcolate internamente. A queste
grandezze sono assegnate quantità fuzzy, con bande at-
torno ai valori centrali. Una deviazione di velocità nulla è il
Un controllore
fuzzy per
turbine eoliche
Lucrezia Campbell
PC Control per turbine eoliche
Grafica del pitch controller
Il controllo delle turbine eoliche si basa oggi su controllori PD
o PID. A causa del comportamento non lineare delle turbine,
la progettazione di tali controllori è laboriosa; un ostacolo su-
perabile grazie all’uso di controllori fuzzy che permettono di
ottenere una procedura più veloce ed efficiente, grazie alla sola
definizione delle regole