

















 110 / 182
110 / 182

MESSAGGIO PROMOZIONALE
Robox ha appena compiuto i suoi primi 40
anni. 40 anni dedicati al controllo del movi-
mento e con un’unica ‘stella polare’: inno-
vare. Fedele a questa missione, anche nel
corso dell’ultimo anno Robox ha lavorato
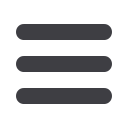
in molteplici direzioni. Anzitutto è stato svi-
luppato il nuovo motion controller RP-1. RP-
1, che Robox presenta a SPS Italia 2015 a
Parma, nasce da una collaborazione con il
gruppo Phoenix Contact. Questo neonato motion controller
ha risorse hardware e software atte a pilotare direttamente
il nuovo bus Axioline di Phoenix Contact (si veda Figura1).
Svariati sono i vantaggi che nascono da questa collabo-
razione. Innanzitutto, Ro-
box può godere della va-
sta e affidabile famiglia
di periferiche di Phoenix
Contact, interfacciate
oltretutto con uno stan-
dard performante quale
è Axioline. RP-1 potrà
pilotare direttamente
quelle periferiche che,
per qualunque motivo,
l’utente desidera tenere
a livello centrale, mentre
potrà ovviamente conti-
nuare a pilotare perife-
riche decentrate di terze
parti utilizzando Ether-
cat, Canopen ecc. Grossi
vantaggi si hanno anche
dal punto di vista della ‘safety’. È ormai opinione comune
che certificare al riguardo della sicurezza il motion control-
ler non sia conveniente. La continua evoluzione delle pre-
stazioni che il mercato impone non permette di giungere
a una certificazione che, di fatto, le ingesserebbe. La scelta
che appare migliore è quella di inserire nel bus esterno di
pilotaggio delle periferiche sia un PLC di sicurezza sia le
periferiche, tipicamente I/O, idonee alla gestione della sicu-
rezza (per esempio per la lettura di un fungo di sicurezza,
il pilotaggio di una funzionalità di ‘torque off’ ecc.). Nella
sua semplicità, il PLC di sicurezza può essere certificato
facilmente. Altrettanto dicasi per i moduli I/O coinvolti. An-
che in questo caso, la collaborazione con Phoenix Contact
risulta vincente, grazie al fatto che la società possiede già
un’ampia gamma di moduli di sicurezza certificati.
Tante attività volte all’innovazione
In linea con la tradizione Robox, RP-1 è totalmente com-
patibile con gli altri motion controller Robox, per quanto
riguarda sia il software, sia gli ambienti di sviluppo.
Ugualmente porta con sé nuove capacità:
•
ai ben consolidati linguaggi di programmazione, carat-
teristici della piattaforma Robox (linguag-
gio strutturato, ladder, ISO, object block) è
stato affiancato il linguaggio RPL concepito
per un’agevole programmazione in campo
robotico. RPL sfrutta la potenzialità della
biblioteca RPE (Robox Path Executor), ren-
dendo le risorse dello strumento più facil-
mente utilizzabili dal programmatore;
•
il numero degli assi controllati è salito a
255;
•
è stata introdotta la ‘planar compensation’,
molto utile ogniqualvolta si voglia superare
la precisione intrinseca della meccanica
della macchina;
•
molto altro ancora.
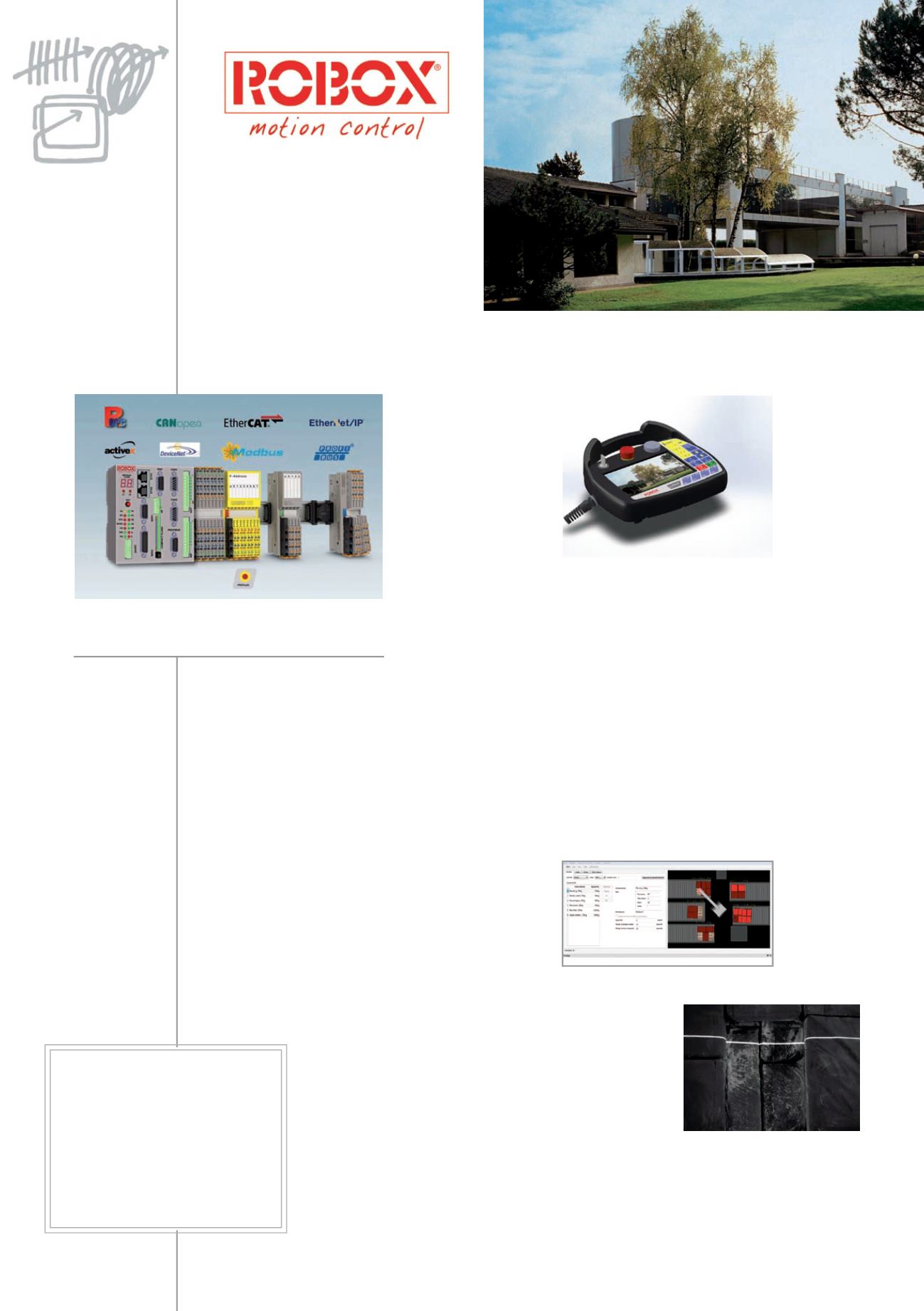
Nel corso dell’ultimo anno è stata inoltre avviata una col-
laborazione con Asem, volta allo sviluppo di un terminale
di programmazione concepito per la programmazione dei
robot e non solo (si veda Figura 2). Questa collaborazione
non si è fermata al predetto sviluppo, ma è andata ‘ol-
tre’ coinvolgendo HMI e PC industriali. Particolarmente
interessante riguardo l’HMI è la possibilità di effettuare
‘Remote Service’ mediante le prestazioni di Ubiquity.
Infine, e questa è senz’altro una novità nella storia della
Robox, nell’ultimo anno sono stati affrontati i problemi di
visione. Si è infatti constatato che, mentre nel campo 2D
per applicazioni robotiche il mercato fornisce un’ampia
scelta di soluzioni, non altrettanto accade per le problema-
tiche 3D. Robox ha pertanto deciso di avviare un’attività di
sviluppo in questo campo.
Sono stati sviluppati algoritmi per la visione stereoscopica
(una dimostrazione di visione stereoscopica sarà esposta
nello stand Robox - al pad. 3 stand D 040) e algoritmi basati
sulla triangolazione laser. Robox si è concentrata, in par-
ticolare, sul problema della depallettizzazione robotizzata
di sacchi su pallet (si vedano Figura 3 e Figura 4), sacchi
che per varie ragioni sono sempre malamente strutturati.
Il problema
è particolar-
mente sentito
nell’industria
per svariate
ragioni, per
esempio: il
peso dei sac-
chi è ecces-
sivo, la forma dei
sacchi non è ben
definita, i sacchi so-
vente contengono
sostanze nocive per
la salute, quasi sem-
pre i pallet vengono
presentati al robot
con lo strato supe-
riore incompleto. Ov-
viamente, in paral-
lelo alle sopra citate iniziative all’avanguardia, continuano
le attività di ‘retroguardia’, volte soprattutto a migliorare la
facilità d’uso, la documentazione tecnica, la manutenibilità
e l’assistenza, in particolare remota, di un prodotto ‘che
non conosce confini’.
Robox SpA
Via Sempione, 82
28053 Castelletto sopra Ticino (NO)
Tel. +39 0331 922086
Fax +39 0331 923262
[email protected] www.robox.itAPRILE 2015
110
Figura 1 - il nuovo motion controller RP-1 di Robox nasce per pilotare
direttamente il bus Axioline di Phoenix Contact
Figura 2 - Robox
collabora con
Asem allo svi-
luppo di un
terminale per
la programma-
zione dei robot
Figura 3 - Sinottico depalletizzatore
Figura 4 - Scansione laser