Versione HTML di base


SETTEMBRE 2012
FIELDBUS & NETWORKS
62
Fieldbus & Networks
Questa misura ha inizio all’inizio del bit r0 su CAN_Tx e ha termine
quando un fronte viene rilevato su CAN_Rx. Il risultato è un valore
specifi co per ciascun nodo, che non dipende dai ritardi di propaga-
zione sulla linea del bus CAN. Al valore misurato del ritardo viene
sommato un offset confi gurabile, che permette di posizionare il punto
SSP al centro dei bit rilevati dal ricevitore CAN_Rx. Utilizzando la
propria implementazione su Fpga del protocollo CAN-FD e transceiver
realizzati con normali chip CAN ad alta velocità, come NXP TJA1040,
Bosch ha realizzato una rete in topologia bus da 42 m dotata di sette
nodi funzionanti alla massima velocità di 500 kbps nella fase di arbi-
traggio/ACK e di ben 15 Mbps in quella di trasmissione dati. Questo
prototipo di rete ad alta velocità è stato messo a punto in laboratorio
a temperatura ambiente.
PDO estesi
Uno dei limiti delle attuali reti Canopen è rappresentato dalla lun-
ghezza degli oggetti che riportano i dati di processo (PDO - Process
Data Objects), che devono essere mappati in un singolo frame dati e
non possono essere segmentati. In alcune applicazioni, però, è ne-
cessario inviare più di 8 byte di dati tutti insieme. Questo avviene
in particolare in casi complessi come quelli di controllo assi, in cui
è necessario inviare simultaneamente tutti i valori di posizione che
devono essere raggiunti; un altro esempio è rappresentato dall’inter-
pretazione dei PDO in determinate modalità specifi cate dal profi lo di
motion control CiA 452 per PLCopen Motion.
Nel protocollo CAN tradizionale per aggirare la limitazione di 8 byte
si provvede a trasmettere diversi PDO in maniera sincronizzata, per
poi riassemblarli nello strato di applicazione utilizzando, per esempio,
numeri di trasmissione univoci. Il ricorso al protocollo CAN-FD, con i
suoi frame dati estesi, permette di utilizzare campi dati più ampi, in
grado di ospitare in un singolo PDO la parola di comando, la modalità
di comando e tutti i valori desiderati di posizione e velocità. Tutto
questo si traduce in una semplifi cazione dei dispositivi e del sistema
nel suo complesso.
Se viene consentita solo una mappatura bit per bit, non è nemmeno
necessario estendere il parametro di mapping dei PDO. Gli attuali
parametri di mappatura dei PDO permettono già di mappare fi no a 64
dati di processo. Ovviamente la mappatura bit per bit è limitata a un
blocco dati di 8 byte.
Gli I/O conformi alle specifi che CiA 401 possono trarre vantaggio
dalla disponibilità di payload di maggiori dimensioni. Se per l’I/O
completamente digitale 8 byte sono suffi cienti a rappresentare 64
segnali di I/O, questo non è più vero nel caso di moduli dotati di I/O
analogico. Stando a CiA 401 la mappatura dal secondo al quarto PDO
riporta quattro valori analogici da 2 byte. Tuttavia nelle applicazioni
industriali il numero di segnali analogici su un singolo dispositivo mo-
dulare Canopen è generalmente più alto. Sono questi dispositivi mo-
dulari che traggono vantaggio dalla disponibilità di un payload esteso.
Per esempio, nel caso di un PDO con un carico utile di soli 32 byte,
diventa possibile trasmettere fi no a 16 canali analogici in un singolo
PDO, contro i 12 canali attualmente disponibili aggregando tre PDO.
Se il dispositivo supporta la mappatura dinamica diventa addirittura
possibile avere fi no a 64 I/O digitali e 12 canali analogici liberamente
confi gurabili in un singolo PDO. E se si utilizzano valori in virgola mo-
bile da 4 byte i benefi ci sono ancora maggiori.
Nuovi protocolli SDO
Esistono due modi per migliorare le comunicazioni SDO (Service Data
Object) durante la confi gurazione del sistema: il primo consiste nel
ricorrere al più alto bit-rate per incrementare la velocità di trasferi-
mento dei dati, in particolare quando viene scaricato il software o
sono caricati i dati diagnostici. Con l’introduzione di nuovi servizi SDO
con segmenti da 64 byte non solo aumenta il throughput, ma diventa
anche possibile indirizzare array e record con un unico veloce accesso
SDO, limitato a un carico utile di 63 byte. D’altro canto, l’implementa-
zione dei protocolli SDO dovrebbe essere mantenuta semplice; è per
questo che attualmente tutti i messaggi PDO hanno una lunghezza
dati di 8 byte. Per conservare la semplicità d’implementazione è pre-
feribile defi nire nuovi protocolli opzionali, che verranno utilizzati solo
da quelle applicazioni che potranno realmente trarre vantaggio dalle
nuove opportunità introdotte. Per il trasferimento di interi blocchi SDO,
impiegato principalmente durante il download del software, un mag-
giore carico utile si può rivelare vantaggioso e capace di accelerare il
trasferimento di grandi quantità di dati. Nella defi nizione dei protocolli
SDO per payload estesi è importante prestare attenzione ai byte inuti-
lizzati, per evitare che i vantaggi di una più alta velocità di trasmissione
vengano vanifi cati sprecando byte nel campo dati. In generale, gli altri
protocolli di comunicazione Canopen non traggono benefi cio dalla di-
sponibilità di payload estesi; fa eccezione il messaggio di emergenza
(Emcy), che può includere informazioni diagnostiche dettagliate. Anche
il protocollo Srdo (Safety-Related Data Objects) può trarre vantaggio
da campi dati più estesi, in maniera analoga a quanto accade con i
PDO. L’incremento di throughput rappresenta un miglioramento anche
per le comunicazioni legate alla sicurezza. Le attuali limitazioni di 64
Srdo possono essere superate e, grazie al carico utile esteso, diventa
possibile trasmettere in un singolo segmento di rete una maggiore
quantità di informazioni di processo relative alla sicurezza.
Microcontrollori di prossima generazione
L’adeguamento di un profi lo di comunicazioni Canopen allo strato di
collegamento dati CAN-FD è sorprendentemente semplice. Non è dif-
fi cile adottare gli stack di protocollo attualmente disponibili; oltre alla
confi gurazione dei parametri del secondo bit-rate è necessario gestire
con attenzione tutti i frame buffer per tenere conto dell’accresciuta
dimensione dei frame (fi no a 32 o 64 byte), un aspetto particolarmente
delicato in tutte quelle applicazioni dedicate, o embedded, in cui le
risorse di memoria sono limitate. CiA pubblicherà le specifi che avan-
zate CiA 301 quando saranno stati implementati nei microcontrollori
dei controllori CAN-FD di più di un produttore di chip. ST Microelec-
tronics, Infi neon, Freescale e Fujitsu si sono dimostrati interessati a
implementare il nuovo protocollo nella prossima generazione di mi-
crocontrollori.
(*) Traduzione a cura di Massimo Giussani
CiA - CAN in Automation
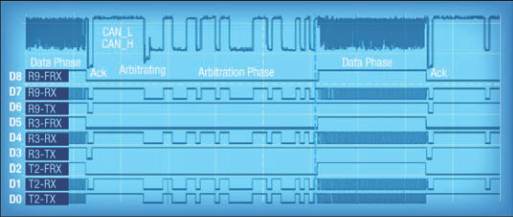
Frame CAN-FD con campo dati di 64 byte alla velocità di 12 Mbps